Projects
Hands-on implementation of robust systems for the physical world.



About
Ai and Robotics engineer with hands-on experience developing autonomous navigation, SLAM, and simulation-driven robotic systems.
Worked on AMR, humanoid, quadruped, and manipulator platforms using ROS 2, LiDAR, depth cameras, and high-fidelity simulation. Experienced in integrating AI models, imitation and reinforcement learning pipelines, and deploying systems from simulation to real-world robots with a strong focus on scalable software architecture.
Technical Skills
I have proactively pursued self-learning and leveraged various online learning platforms to acquire a diverse set of skills.
- Core: Python (OOP), C++, C
- Robotics: ROS 2 (Humble/Jazzy), Nav2, RTAB-MAP, MoveIt 2, Semantic slam and navigation
- AI & CV: PyTorch, YOLO, OpenCV, MediaPipe, LLM, huggingface, Reinforcement Learning, Ollama
- Simulation: Isaac Sim, Isaac Lab, Ignition Gazebo
- Tools: Git, Linux, AutoCAD (Fusion360)
Experience & Education
Professional Experience
Bluefordge Labs
Lead Physical Ai Engineer
March 2026
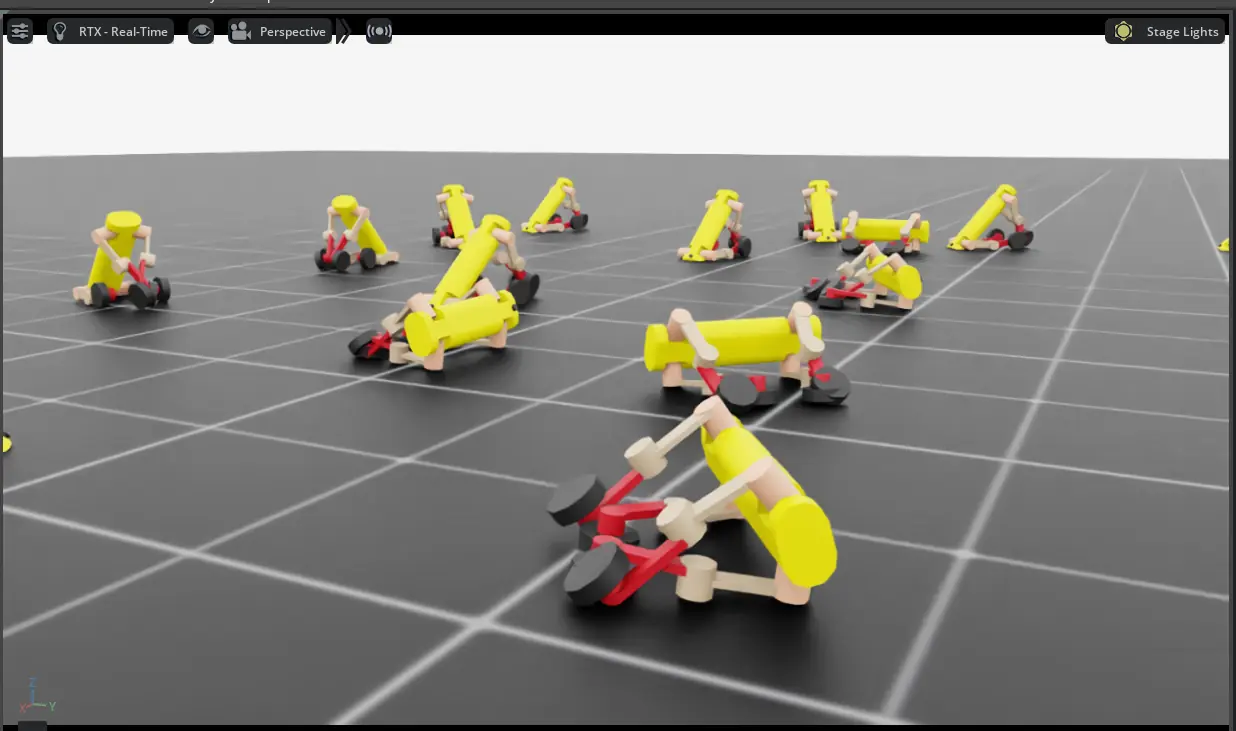
- Quadruped Locomotion: Working on Quadruped locomotion and robotic arm, simulation (Isaac Lab), and real-world robotic applications.
MuksRobotics
Robotics Engineer
April 2025 – December 2025
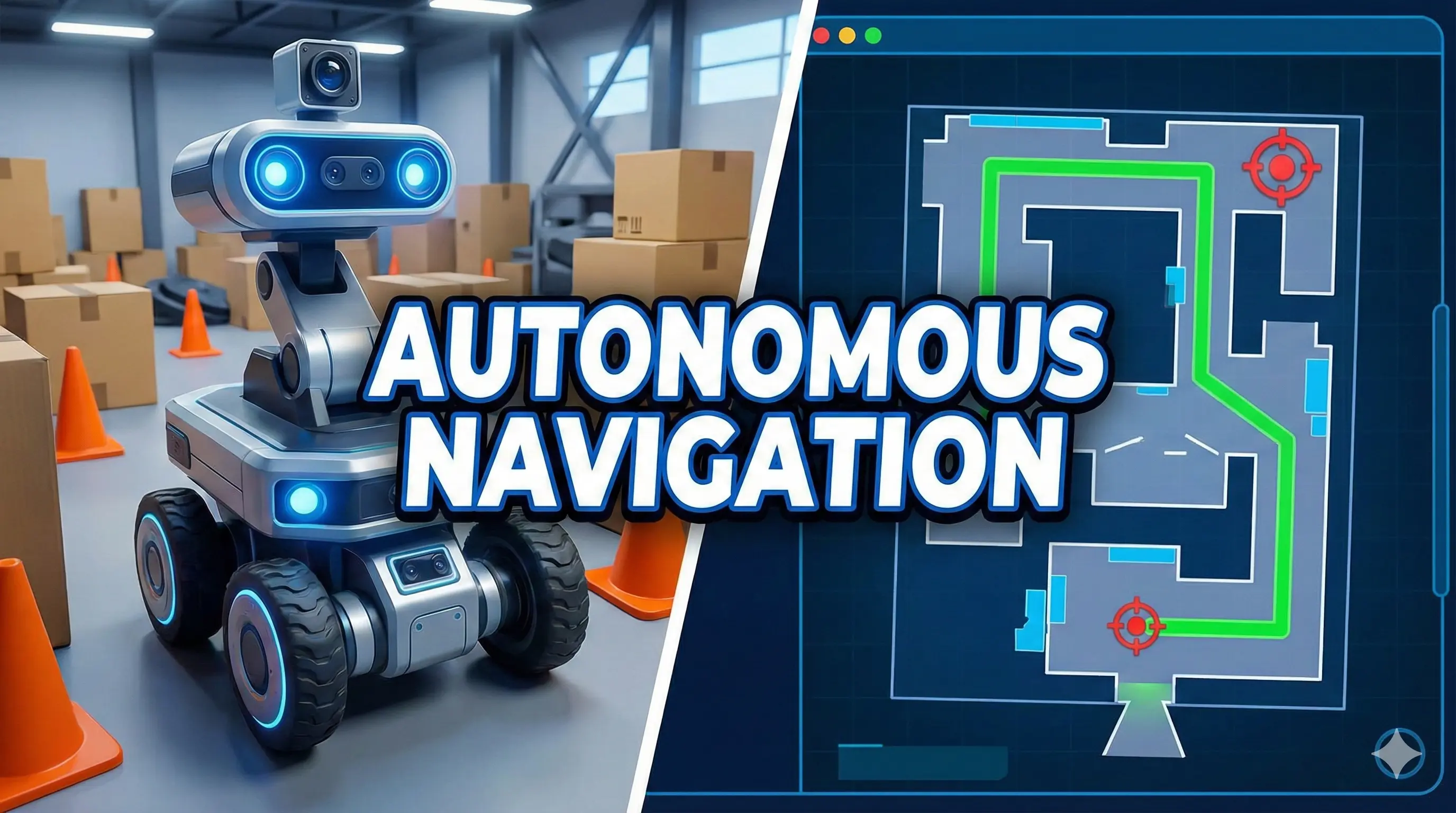
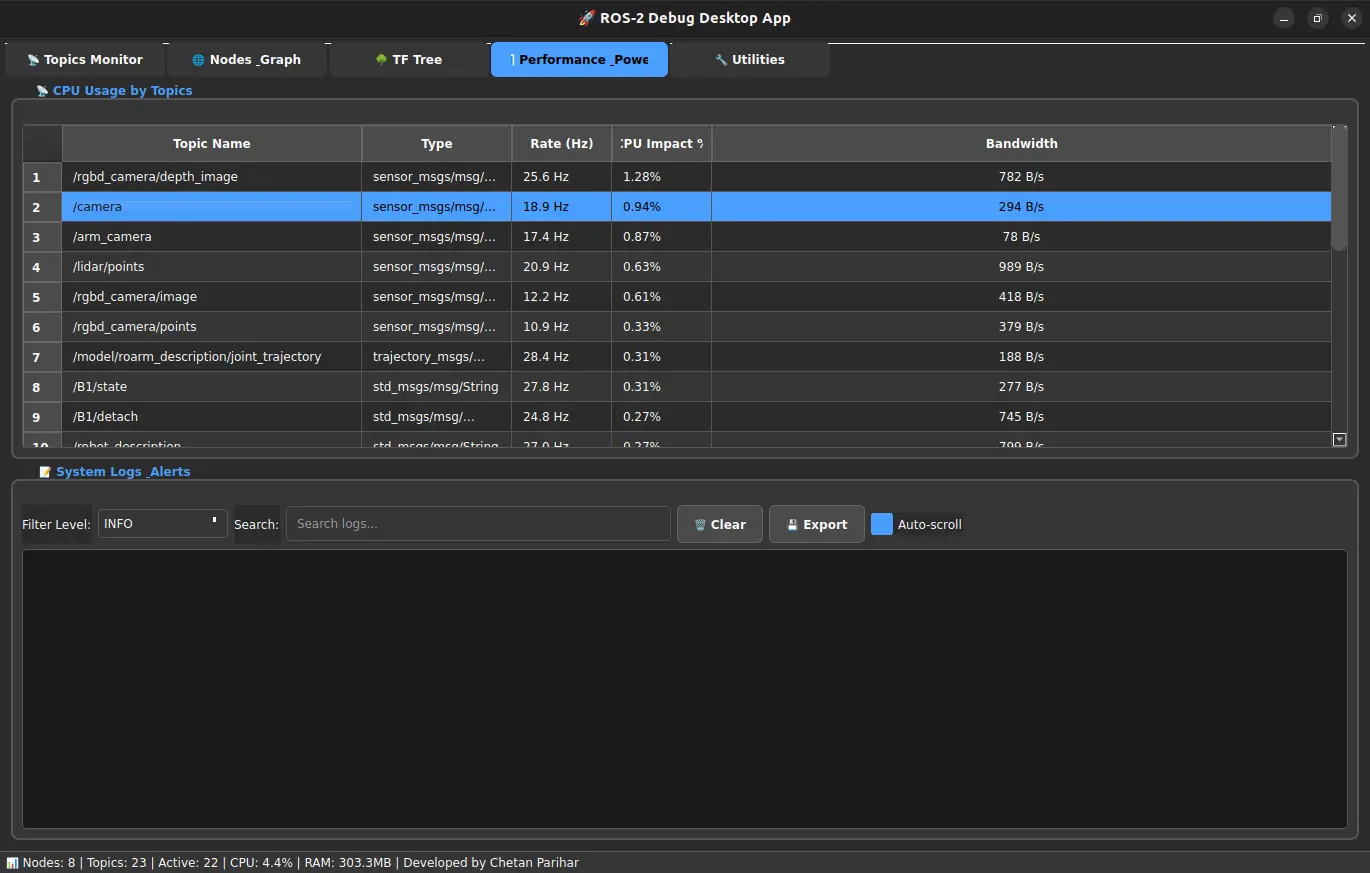
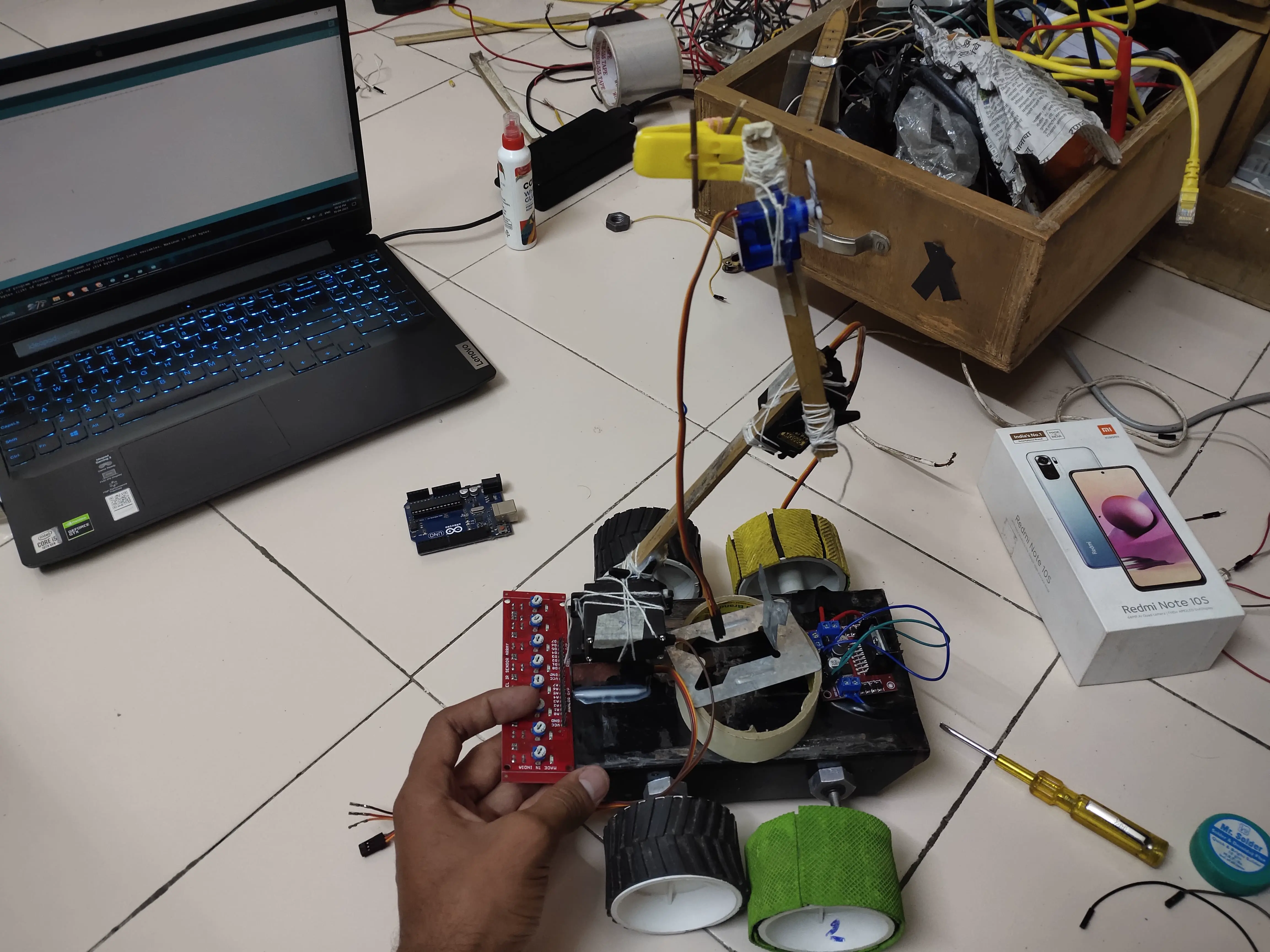
- Autonomous Navigation Systems: Developed navigation stacks using 2D LiDAR, 3D LiDAR, and RGB-D cameras across AMR, Humanoid, and Quadruped platforms (Spaceo Pro, SpaceoM1 Gen3, Unitree Go1).
- Robot SDK Architecture: Architected a scalable Robot SDK to abstract hardware interfaces, enabling seamless integration between low-level control, AI modules, and high-level software for both Ignition Gazebo simulation and real-robot deployment.
- High-Performance Compute: Implemented multi-sensor navigation on Unitree Go2 Air using Unitree 4D L2 LiDAR and Intel RealSense D435i, leveraging RTAB-Map (ROS 2) on NVIDIA Jetson AGX Orin.
MuksRobotics
AI & Robotics Intern
August 2024 – February 2025
- Simulation Environments: Built reusable workflows in Gazebo Classic and Ignition Gazebo for mobile and manipulator robots. Created high-fidelity environments using Blender assets to evaluate ACT-based manipulation policies.
- Manipulation & Sim-to-Real: Integrated MoveIt 2 for the RoArm-M2-S robotic arm. Successfully trained Action Chunking Transformer (ACT) policies in simulation and deployed them to the real robot for validation.
- Reinforcement Learning: Gained hands-on experience with control and policy learning workflows using Stable-Baselines3.
- Quadruped Navigation: Implemented ROS 2 mapping and localization on the Unitree Go1 robot using Nav2 and Slamtec A2M12 2D LiDAR.
Techriigour IT Solutions Pvt. Ltd.
On-the-Job Training – AI
April 2024 – May 2024
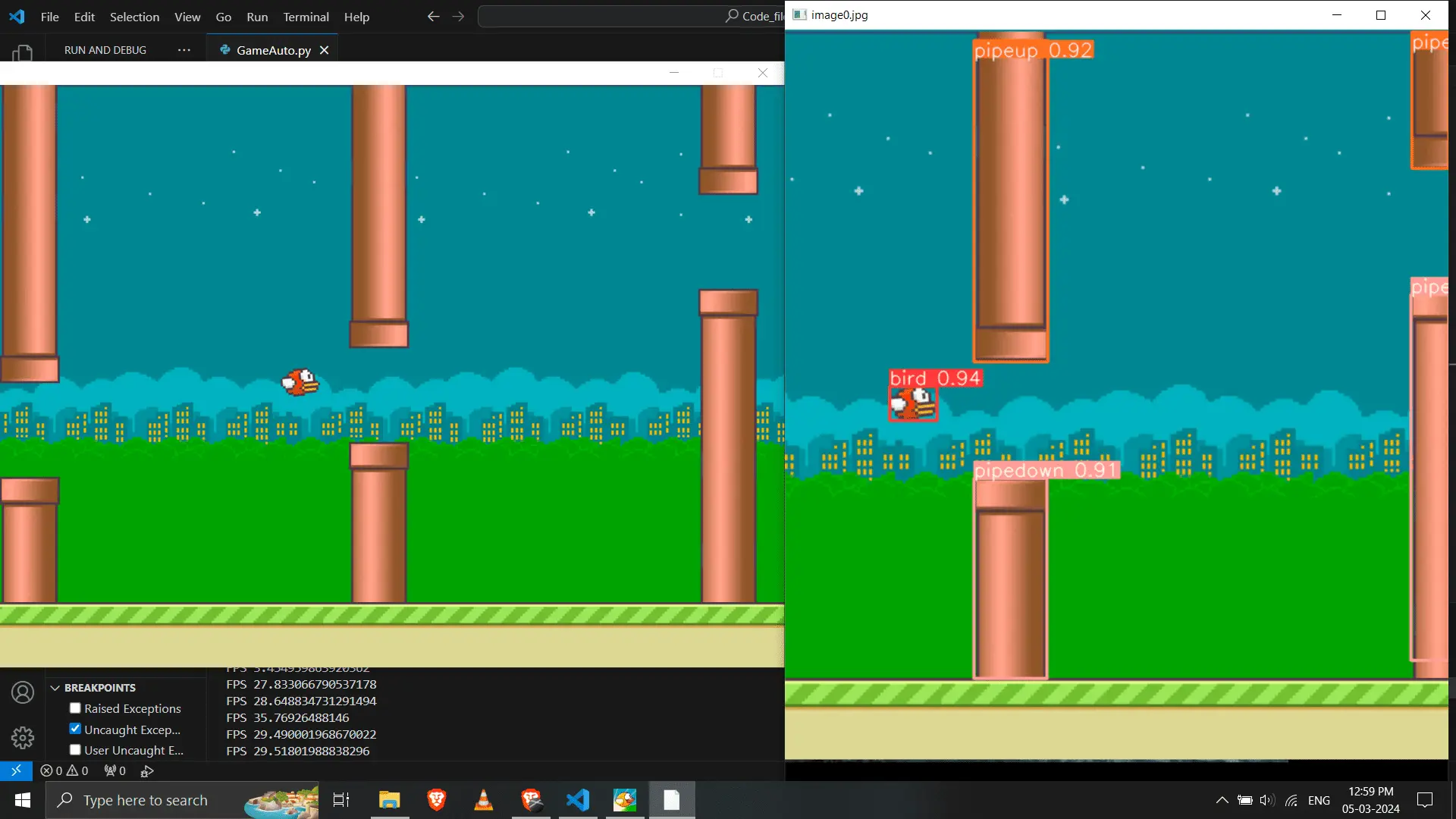
- Developed an AI application focusing on image-based object counting functionality.
- Implemented YOLOv8 for accurate object detection and quantification in static images.
- Integrated the object-counting pipeline into the core application workflow for automated visual analysis.
LetsGrowMore
Data Science Intern (Virtual)
March 2023
- Gained hands-on experience in data cleaning, preprocessing, and exploratory data analysis (EDA) on real-world datasets.
- Built and evaluated machine learning models to solve data-driven problems.
Research & Publications
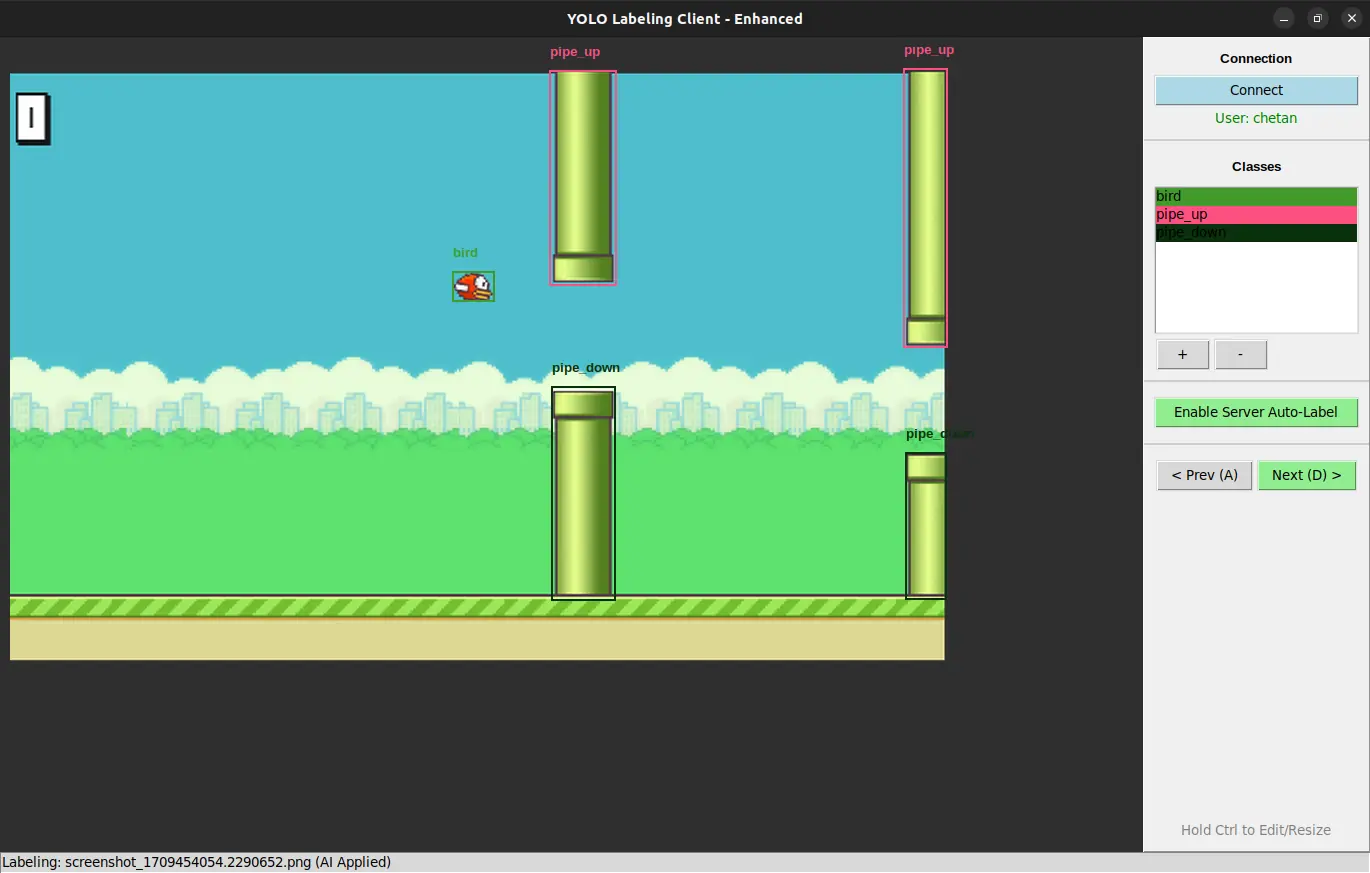
AI-Assisted Image Annotation System
Published: April 2025 | IRJMETS
- Abstract: Proposed a semi-automated annotation workflow using YOLOv8. The system employs an iterative active learning mechanism that reduces manual labeling effort by 70-80%.
- DOI: 10.56726/IRJMETS73213
- Read Paper »
Guest Lecture
Computer Vision (OpenCV)
August 2022
Organised by Team Raptors @ Dr. D.Y. Patil Institute of Technology, Pimpri
- Delivered a hands-on practical session on Computer Vision.
- Addressed student queries regarding image processing pipelines and real-time detection.
- Watch Video Highlight
Education
MSc (Computer Science)
2023 - 2025
Pratibha College of Commerce & Computer Studies, SPPU, Pune
Bachelor of Computer Science
2020 - 2023
Audyogik Tantra Shikshan Sanstha, SPPU, Pune
Contact
Let's connect and build something amazing together.
Location
Pune, Maharashtra, India