Project Information
- Category: Robotics Software Tool
- Platform: Desktop (Linux)
- Date: 4 Dec 2025
-
Tech Stack:
ROS 2 Python Qt / PyQt rclpy - View on GitHub
Overview
This project is a GUI-based ROS 2 debugging and monitoring application
built to simplify the inspection and analysis of complex robotic systems.
It consolidates commonly used ROS 2 debugging workflows into a single,
intuitive desktop interface—reducing reliance on multiple CLI tools like ros2 topic list or ros2 node list.
Key Features
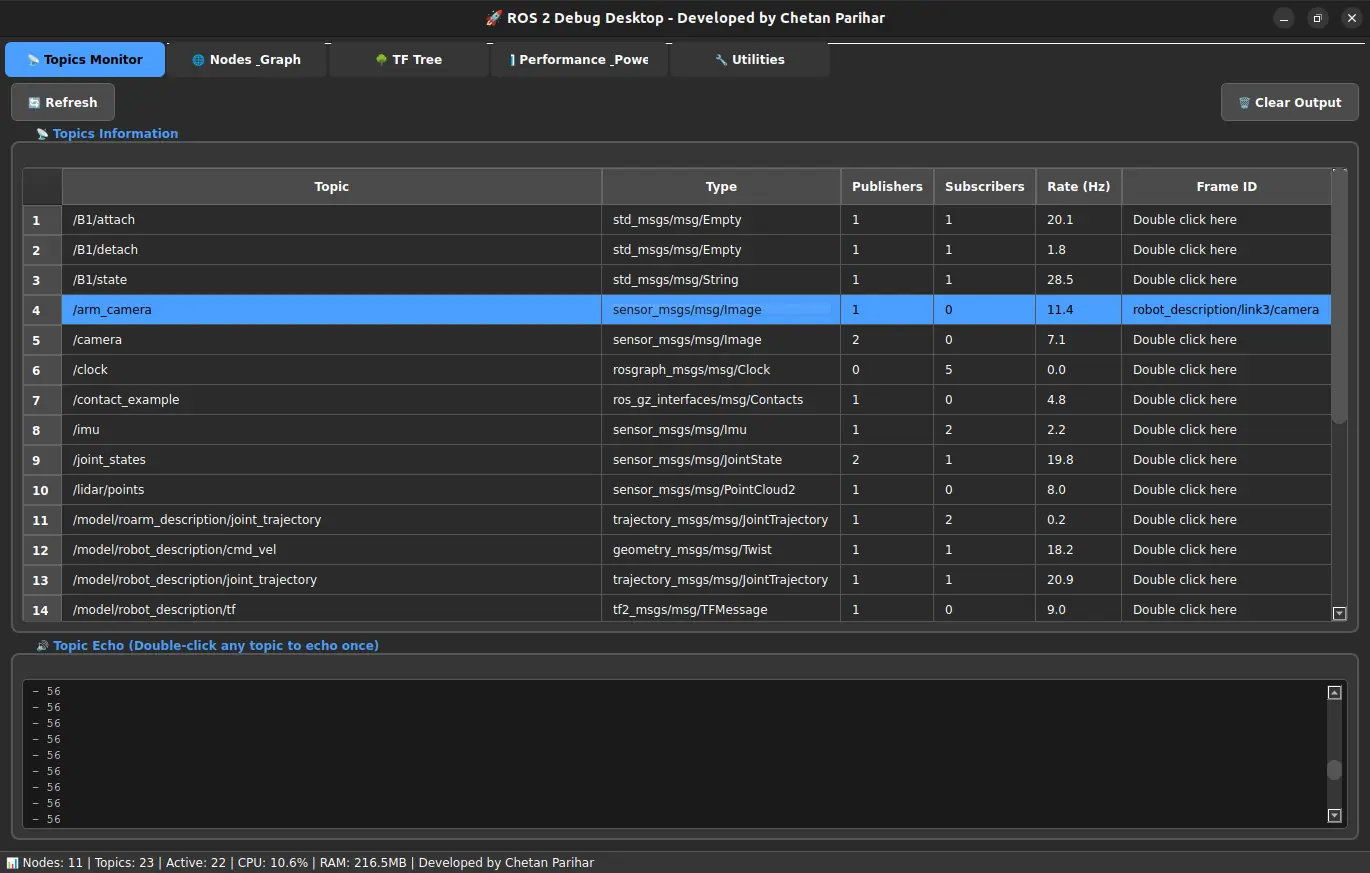
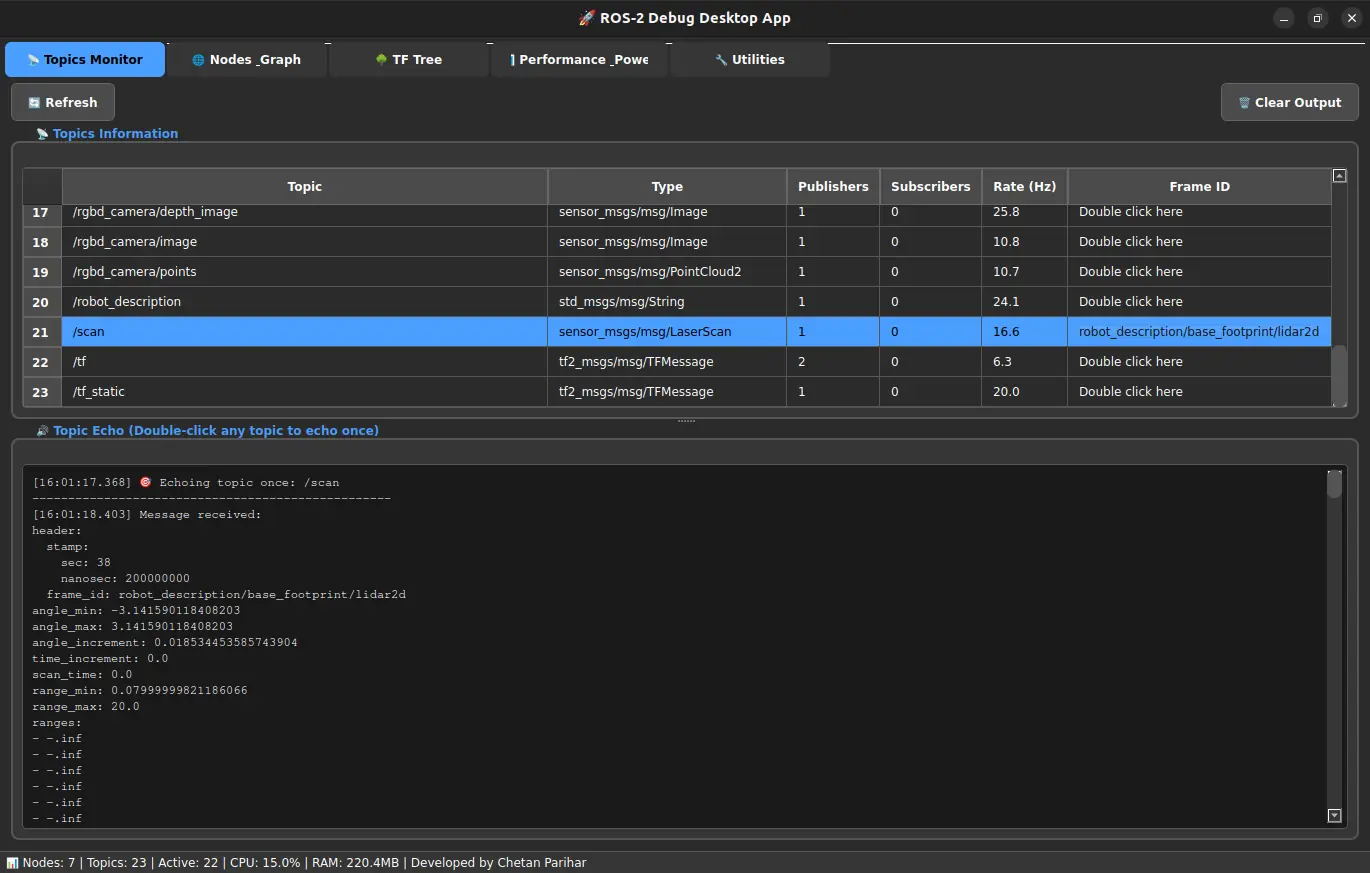
Topic Monitor
Displays a live list of all active ROS 2 topics with message types, publisher/subscriber counts, and frequency. Supports quick inspection through a built-in echo tool and context-based copy actions.
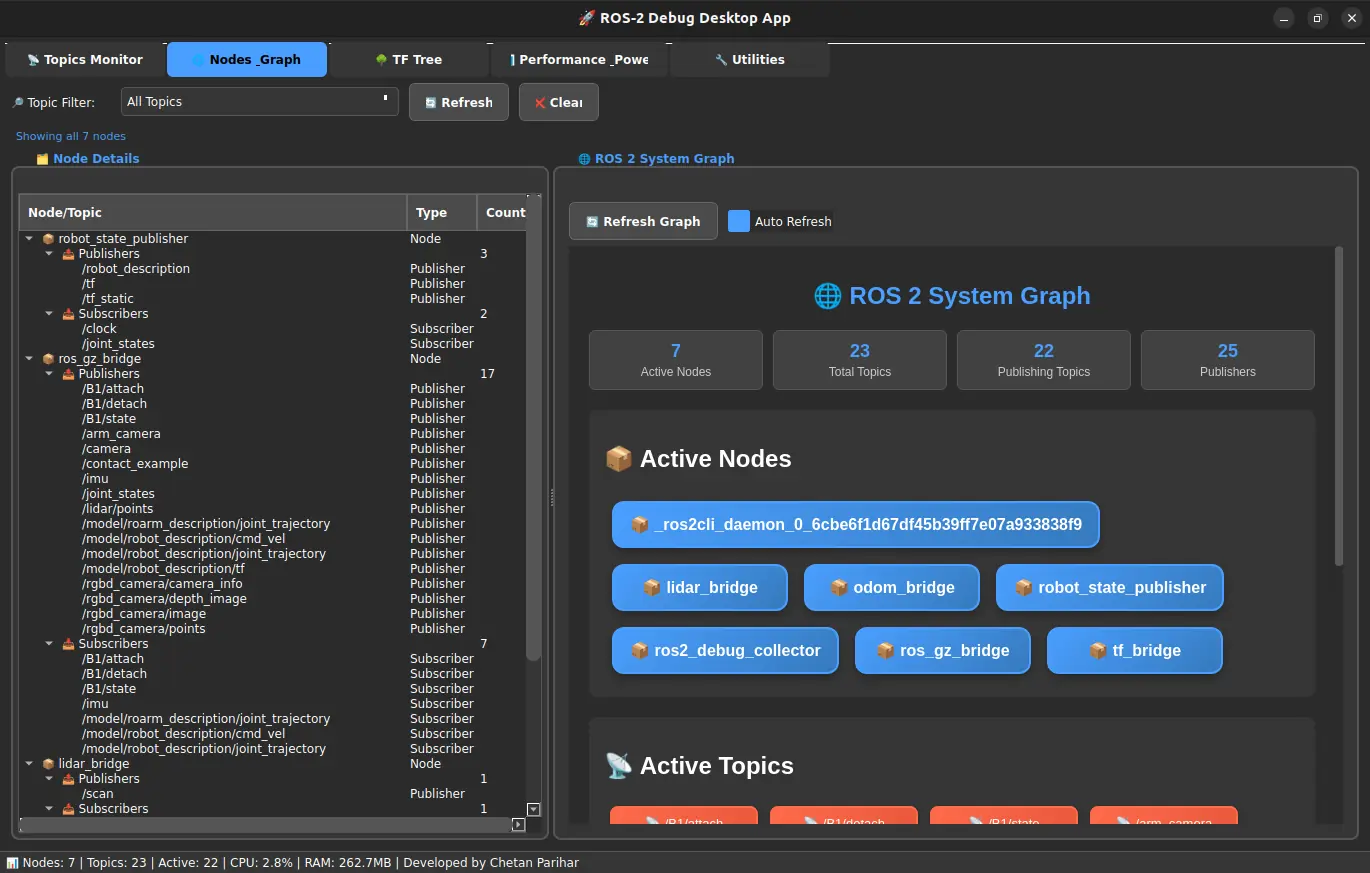
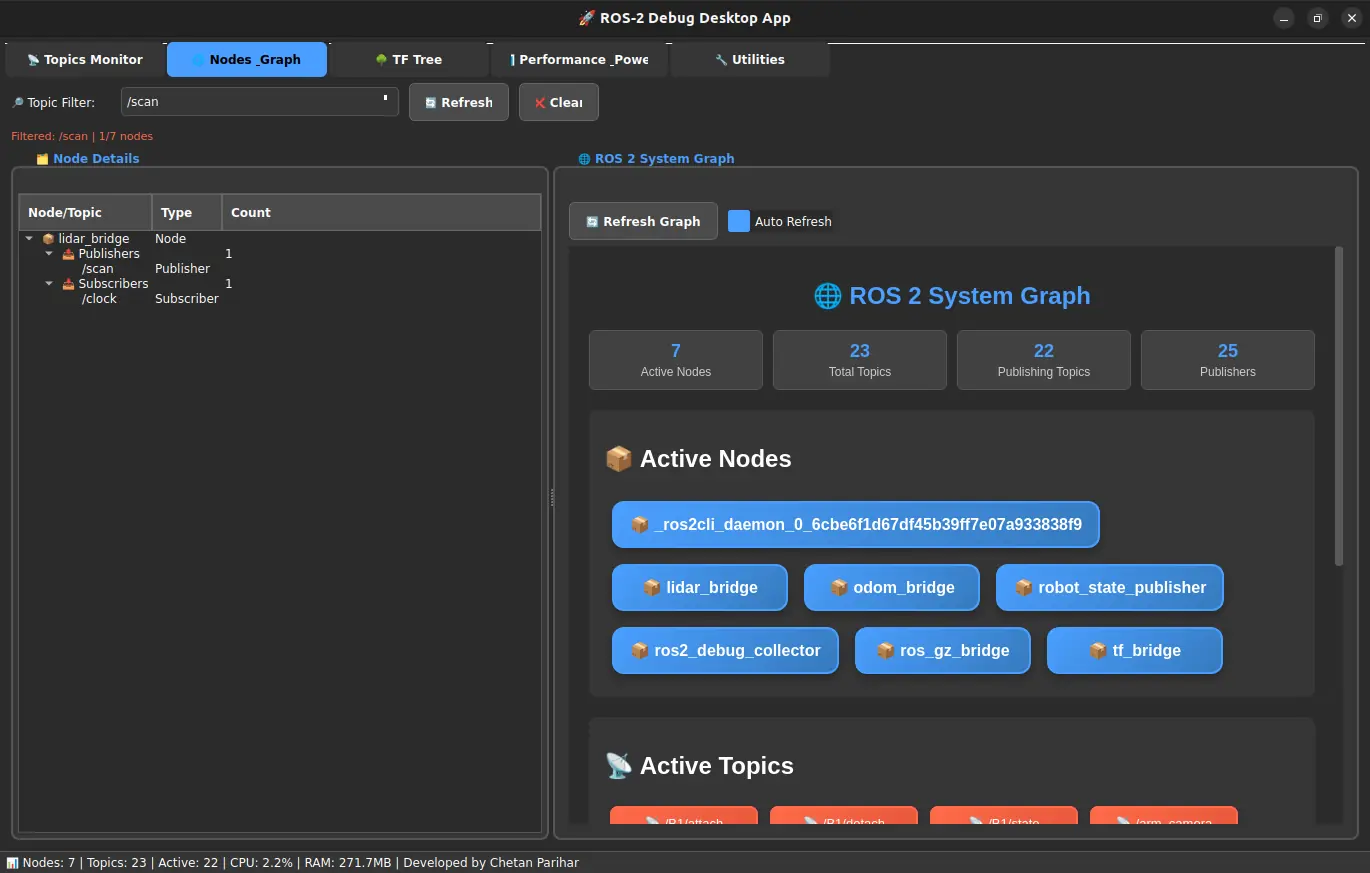
Nodes & Graph View
Visualizes the complete ROS 2 computation graph. Provides a structured tree view of publishers, subscribers, services, and topic connections for each node, with filtering support.
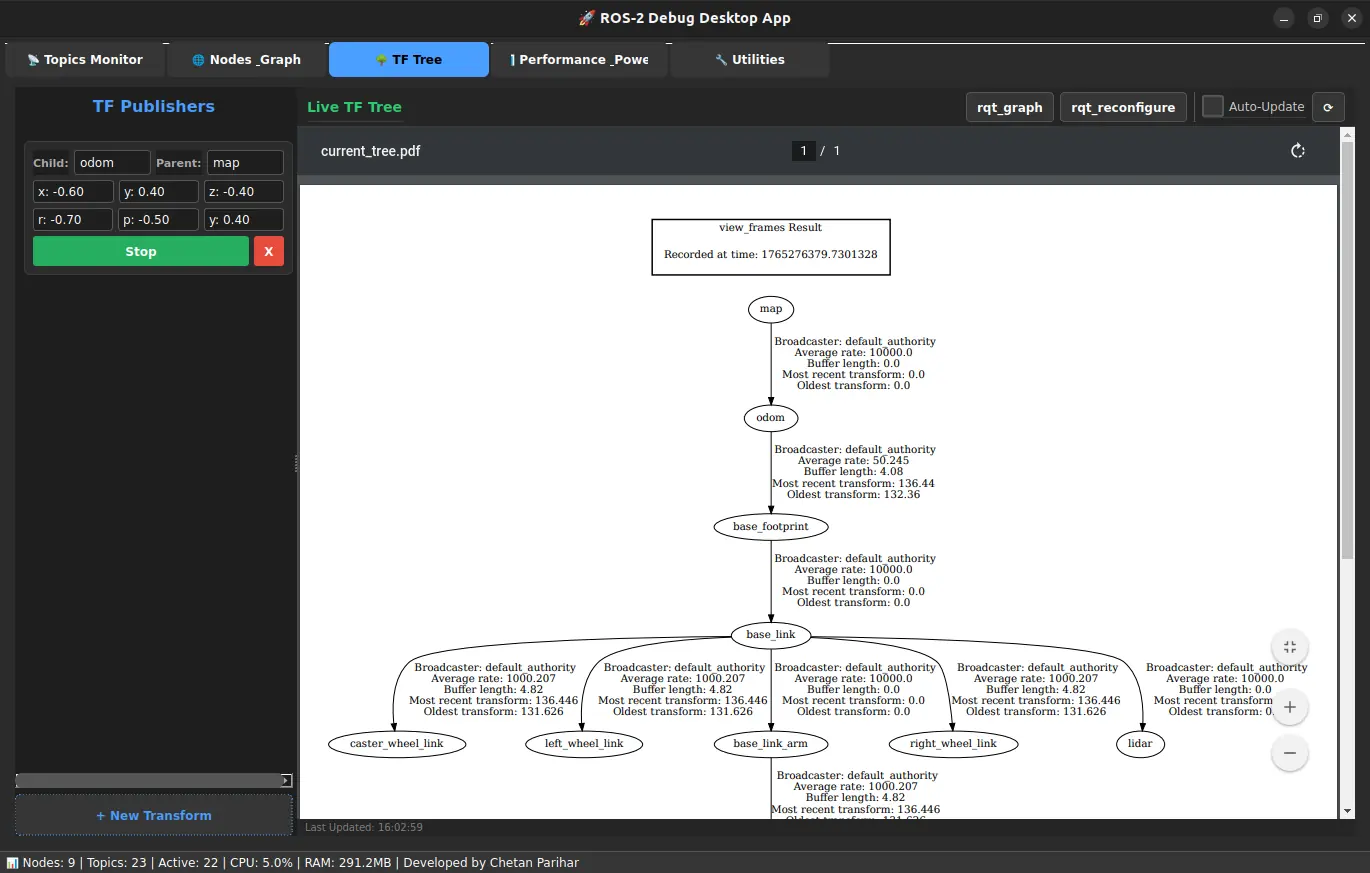
TF Tree Visualizer
Automatically generates the TF (Transform) tree, exports it as a PDF, and renders it inside the application. Includes a static TF publisher utility and auto-refresh for dynamic frame updates.
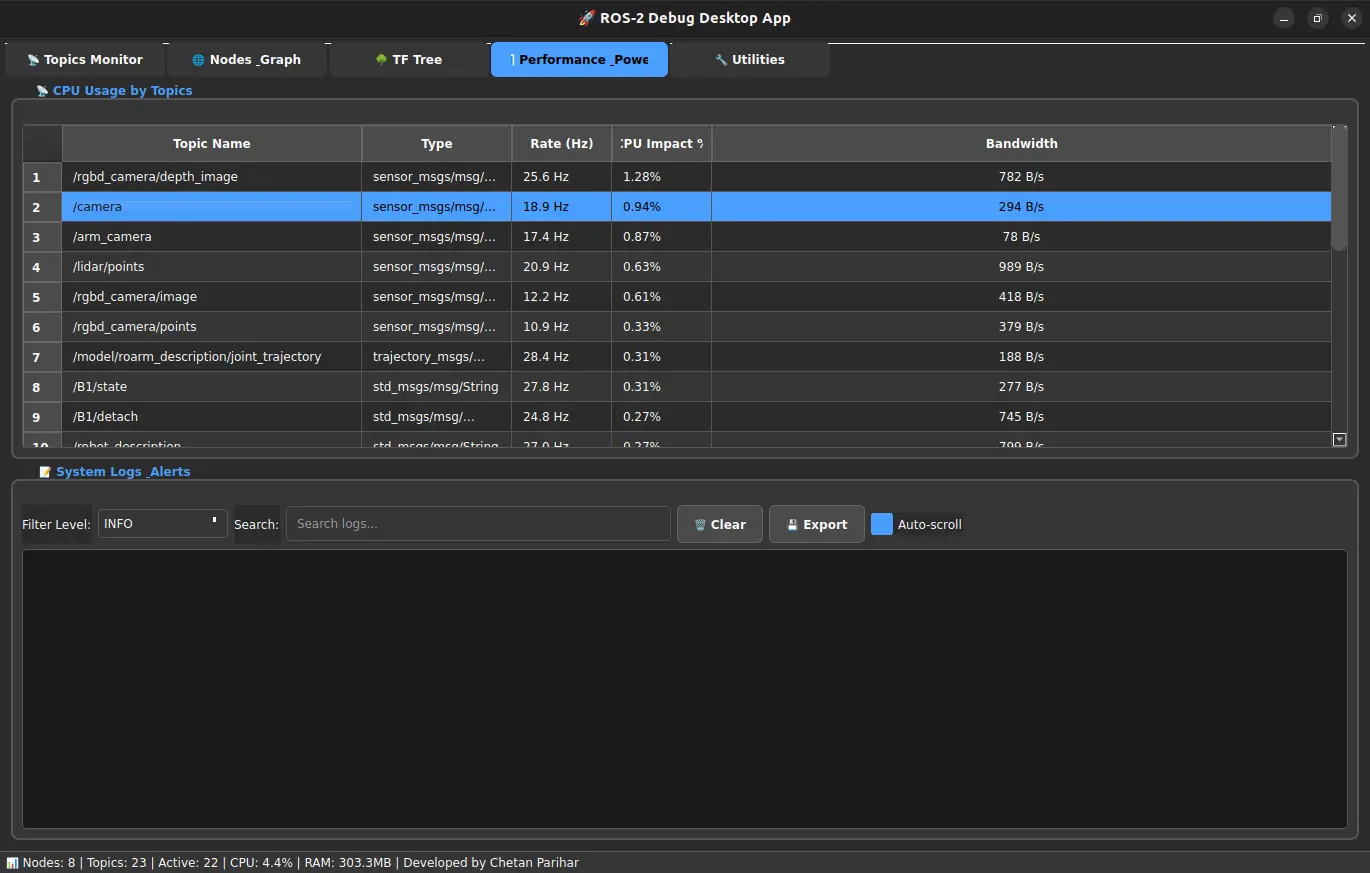
Performance & Power
Monitors real-time CPU, RAM, Disk I/O, and Network usage. Provides per-node ROS resource consumption and estimates system power usage. Includes a searchable ROS and system log viewer.
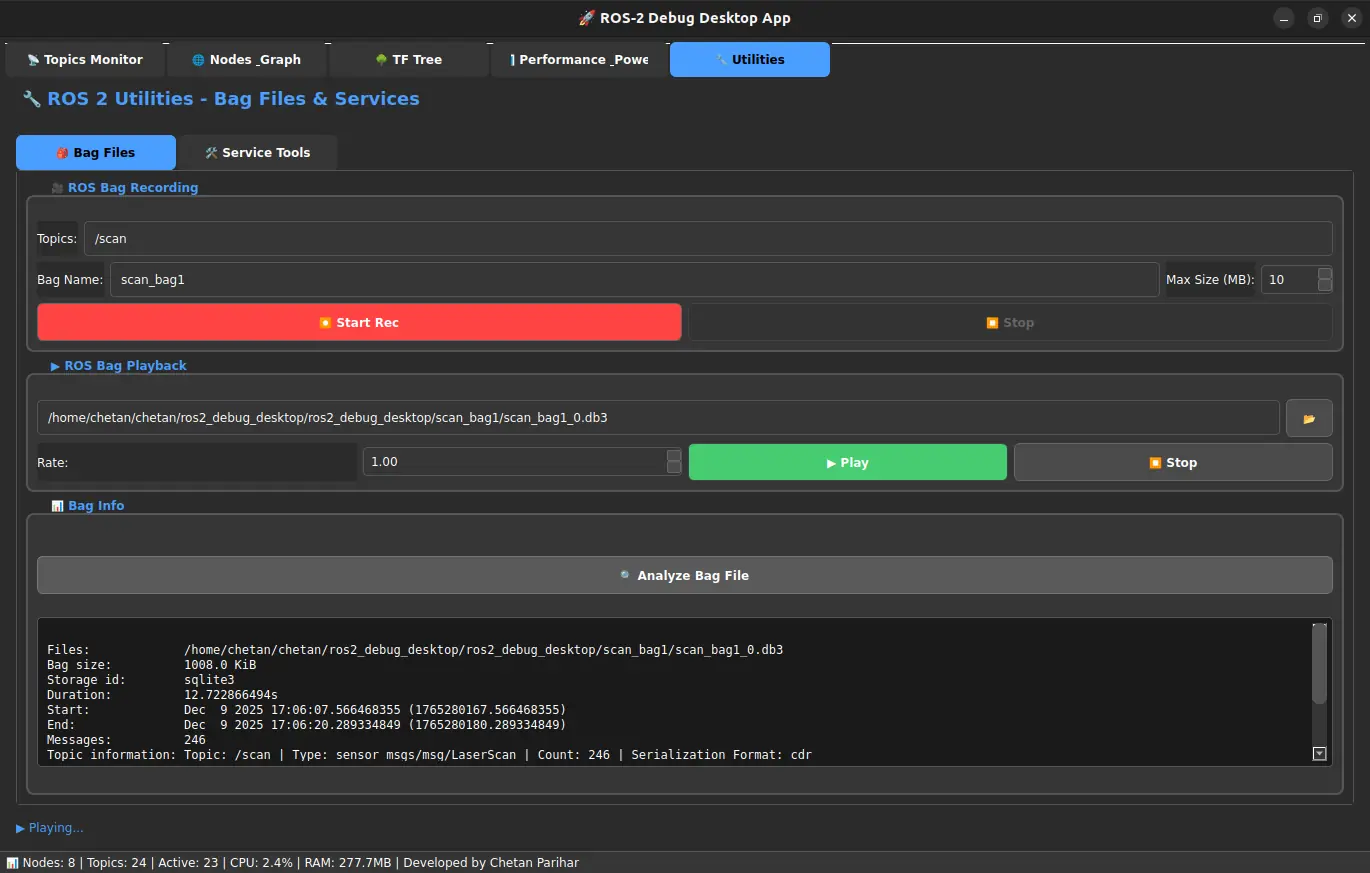
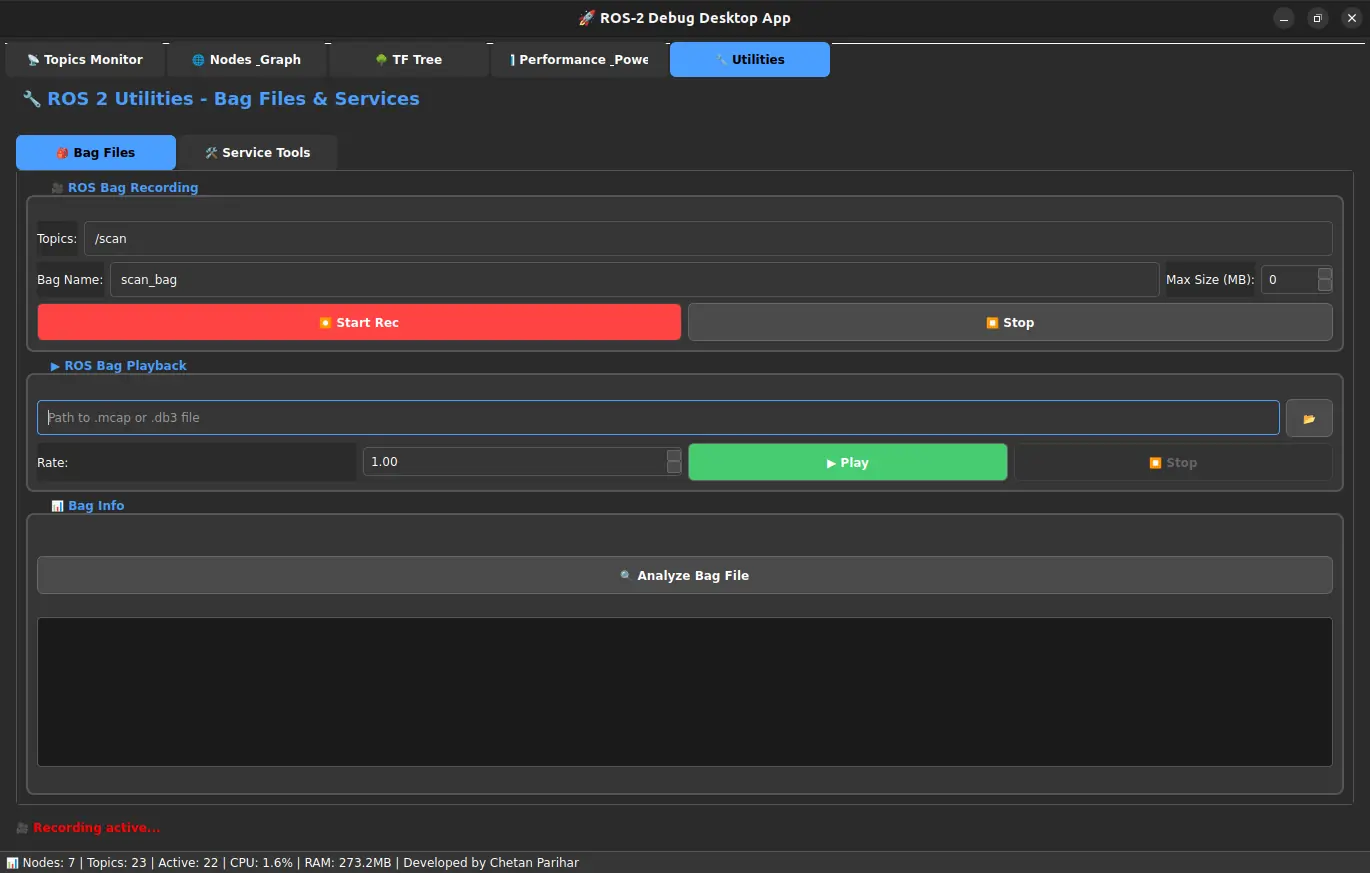
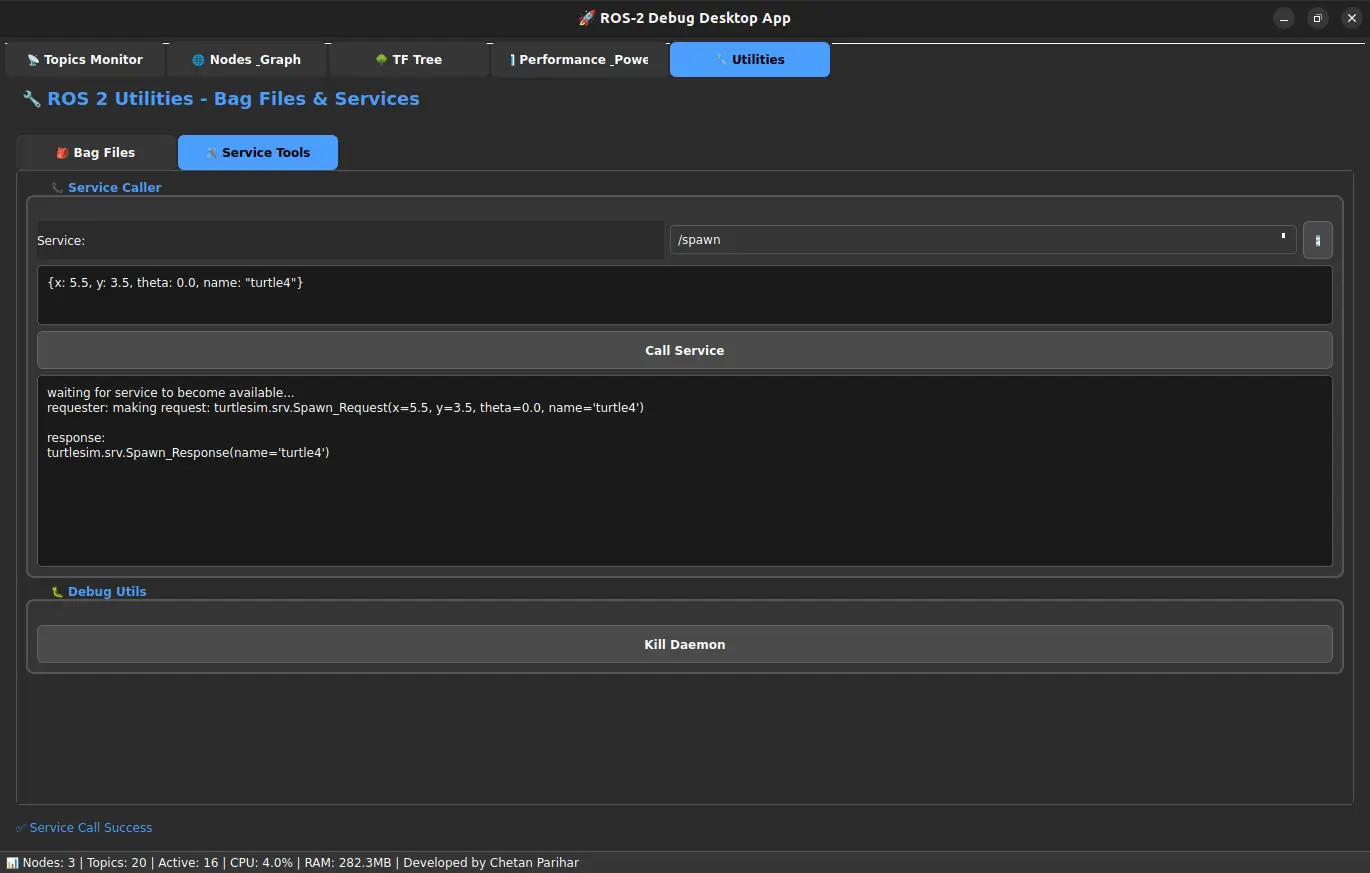
Utilities (Bag & Services)
Integrated tools for recording and playing ROS bag files
(.mcap / .db3), speed-controlled playback,
and a GUI-based service caller supporting JSON and YAML requests.